 Fraunhofer-Institut für Zerstörungsfreie Prüfverfahren IZFP
Fraunhofer-Institut für Zerstörungsfreie Prüfverfahren IZFP 
GecKI ist das Akronym für »KI-basierte Objekterkennung und adaptive Steuerung für intelligente, bioinspirierte Robotergreifsysteme zur Einbettung in Industrie 4.0-Umgebungen«.
Wie kann durch Einsatz künstlicher Intelligenz ein möglichst vielseitig einsetzbares und energieeffizientes Greifsystem geschaffen werden, das von KMUs und Großunternehmen gleichermaßen genutzt werden kann, um einen Sprung hinsichtlich intelligenter, selbstregulierender und damit anpassungsfähiger Handhabungsprozesse zu machen?
Daraus ergibt sich die zentrale Ausgangsfrage des Forschungsvorhabens: Das Ziel des Verbundvorhabens besteht darin, Methoden der künstlichen Intelligenz weiterzuentwickeln, um ein neuartiges bioinspiriertes System zu entwerfen, das auto-adaptive robotergestützte Manipulation mit Objekterkennung ermöglicht. Das Vorhaben trägt dazu bei, die Wirtschaftlichkeit von flexiblen und wechselnden Produktionen zu steigern damit der Wirtschaftsstandort Deutschland weiter konkurrenzfähig bleibt und im Bereich technologischer Innovationen für hochflexible Produktionstechniken eine führende Rolle einnimmt.
Die Fähigkeiten des KI-basierten Greifsystems werden in verschiedene Level gegliedert, die in ihrer Komplexität steigen und verschiedene Integrationsstufen in industriellen Umgebungen repräsentieren. An einem Testaufbau wird die KI inkl. Trainingsmethoden entwickelt und zur Validierung auf Demonstrator-Anwendungen übertragen, die an verschiedene Robotersysteme anpassbar sein werden. Neben der wissenschaftlichen Exzellenz der Resultate wird eine öffentlich zugängliche Demonstration von GecKI das zweite Hauptziel darstellen.
Die neuartigen Möglichkeiten zum Einsatz der intelligenten Greifsysteme münden in die Zusammenarbeit mit begleitenden Industrieunternehmen zur Erhöhung der Nutzerfreundlichkeit und der breitenwirksamen Sichtbarkeit der erzielten Ergebnisse des Forschungsprojekts. Durch die enge Verzahnung und frühe Diskussion mit Endanwendern zusätzlich zur rein wissenschaftlichen Arbeit wird eine anschließende Wertschöpfung der Gesellschaft durch GecKI sichergestellt.
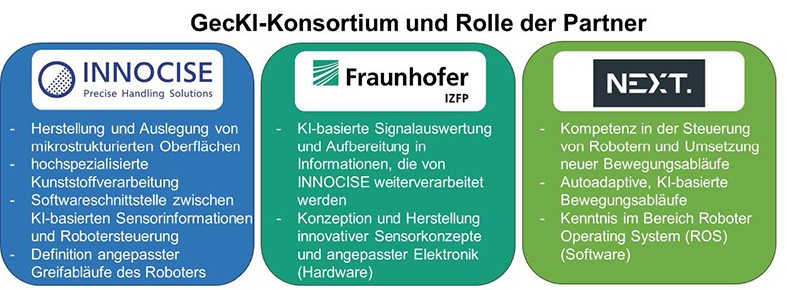
Das Projektkonsortium besteht auf unternehmerischer Seite aus der INNOCISE GmbH sowie der NEXT. robotics GmbH & Co. KG und auf Forschungsseite aus dem Fraunhofer IZFP.
Als Ausgründung aus dem INM – Leibniz-Institut für Neue Materialien kann INNOCISE auf mehr als 10 Jahre wissenschaftlichen Forschungsergebnisse aufbauen. Diese wird durch die Erfahrung des Fraunhofer IZFP im Bereich kognitiver Sensorsysteme, Sensormaterialien und KI-basierter Datenauswertung ergänzt.